The UW Robotics Team is a Design Team that designs and builds a Mars Rover to compete at the international University Rover Challenge each year. The goal of the team is to provide students with hands-on engineering experience.

My involvement began working on the drivetrain for the UWRT rover.
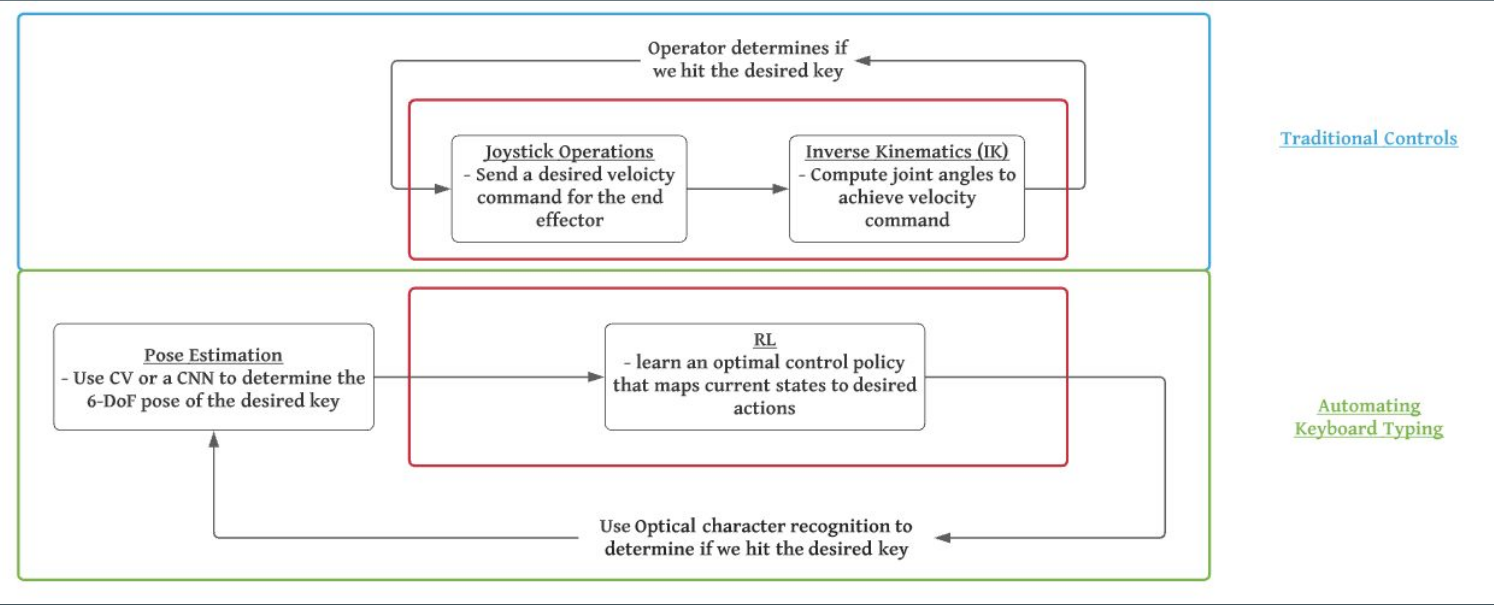
I then got involved with the controlling the UWRT arm using Inverse Kinematics.
We hope to implement Reinforcement Learning in lieu of traditional path planning and control!
Roboteq Motor Controller Driver Library
Developed a Roboteq Motor Controller Driver Library in C++.
Cartesian Controller
Implemented a Cartesian Controller with KDL Inverse Kinematics for ROS Control and Developed a tool to visualize 3D Non-linear Workspace of a Robot Arm.
Automate Keyboard Typing using RL
Leading a project to Automate Keyboard Typing based on knowledge gained from an online course, Berkeley’sCS285. This will be the first implementation of Reinforcement Learning at the international URC competition.