When it comes to path planning there are numerous measures to evaluate the "goodness" of a path.
These measures might include total length or time, but in this project we are concerned with the smoothness of robot trajectories to minimize longitudinal and lateral jerk. To achieve this, we consider the following:
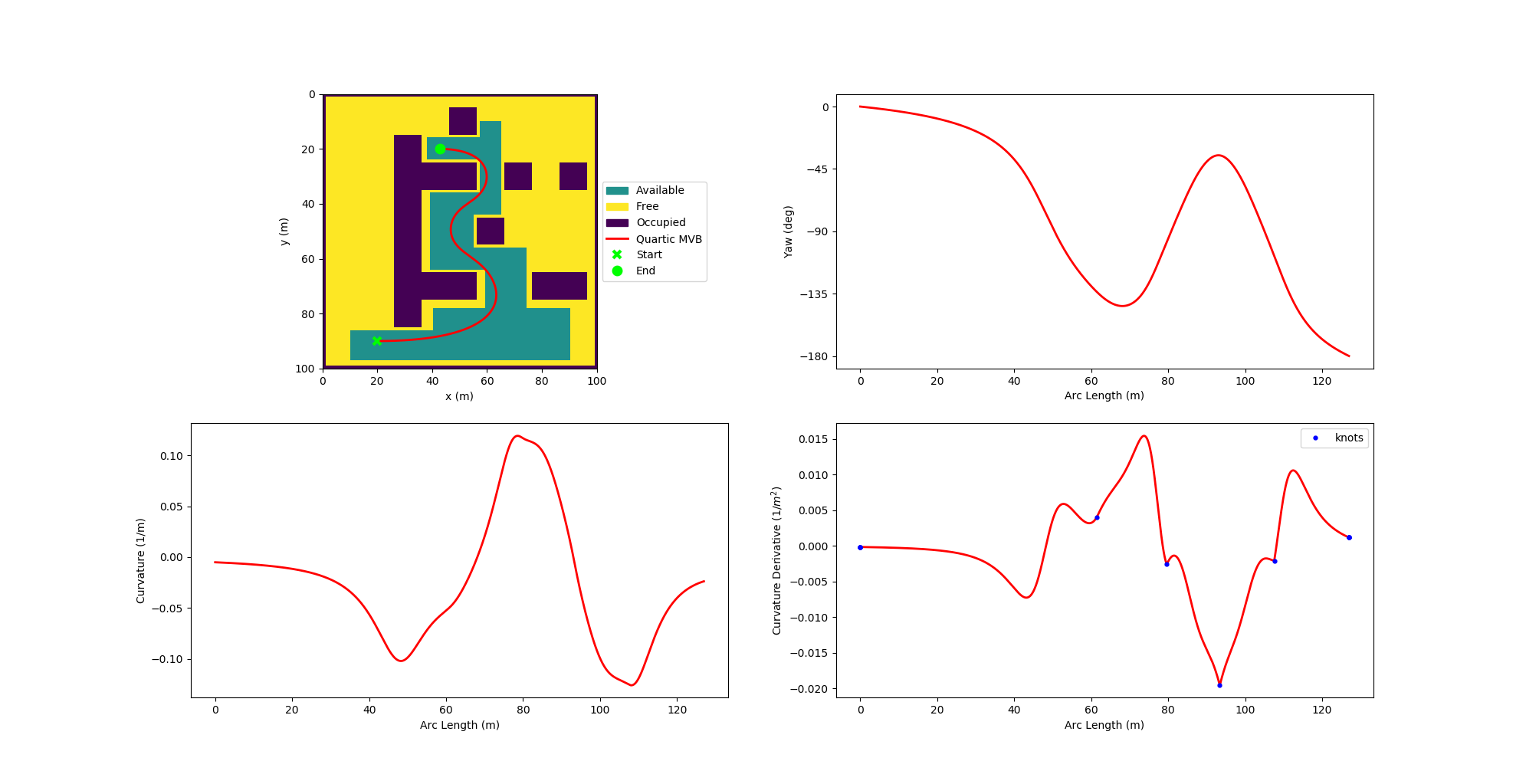
- Paths that are continuous in its derivative of its curvature i.e. C3 continuous.
- Global path planner to obey boundary conditions and space constraints, and
- A local path planner for static obstacle avoidance (see below picture!).
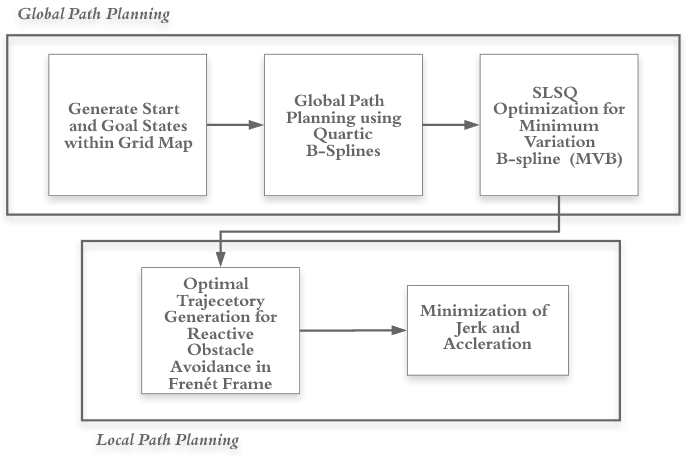
In order to test our framework, we considered curves that were C2 (i.e. Cubic B-Spline) and C3 continuous (i.e. Cubic MVB, Quartic MVB).
Note, C2 continuity does not guarantee smooth accelerations.
We found that is was difficult to validate our work through simulations as numeric instability caused issues with calculating the derivate of curvature.
We would like to validate our work through experiments using real hardware!
Special thanks to Somesh Daga for collaborating on this project and to Python Robtics for stater code for our development!